

চার-পাঁচ বছর আগে, যখন চালক সহায়তা প্রযুক্তি সবেমাত্র শুরু হচ্ছিল, তখন পুরো শিল্প বিতর্ক করছিল "যানবাহন কীভাবে বিশ্বকে দেখবে"।
একটি চিন্তাধারা "বিশুদ্ধভাবে চাক্ষুষ" পদ্ধতির পক্ষে, বিশ্বাস করে যে ক্যামেরা এবং অ্যালগরিদম পরিবেশ বোঝার এবং মানুষের ধারণার প্রতিলিপি তৈরি করার জন্য যথেষ্ট।
আরেকটি চিন্তাধারা মাল্টি-সেন্সর ফিউশনের উপর জোর দেয়, যুক্তি দেয় যে লিডার ছাড়া কোনও স্থিতিশীল, নির্ভুল এবং পরিমাপযোগ্য স্থানিক তথ্য নেই।

▲ টেসলার FSD দৃঢ়ভাবে একটি বিশুদ্ধ দৃষ্টি-ভিত্তিক সমাধান গ্রহণ করে
আজও, বিতর্কটি অমীমাংসিত রয়ে গেছে, কিন্তু বাজার প্রায়শই প্রযুক্তিগত যুক্তির চেয়ে দ্রুত উত্তর প্রদান করে।
উন্নত বুদ্ধিমান ড্রাইভিং সমাধানগুলি ধীরে ধীরে বাস্তবায়িত হওয়ার সাথে সাথে, LiDAR বুদ্ধিমান ড্রাইভিং সিস্টেমের জন্য মূলধারার সমাধান এবং স্ট্যান্ডার্ড কনফিগারেশন হয়ে উঠছে।
গাওগং ইন্টেলিজেন্ট ভেহিকেলের তথ্য অনুসারে, জানুয়ারী থেকে জুলাই ২০২৫ পর্যন্ত, চীনা বাজারে LiDAR দিয়ে সজ্জিত নতুন গাড়ির ক্রমবর্ধমান ডেলিভারি (আমদানি এবং রপ্তানি ব্যতীত) ১.০৪৮৪ মিলিয়ন ইউনিটে পৌঁছেছে, যা বছরে ৬৯.৭৩% বৃদ্ধি পেয়েছে। এর মধ্যে, ২০০,০০০-৩০০,০০০ ইউয়ান রেঞ্জের মডেলগুলির স্ট্যান্ডার্ড সরঞ্জামের হার একবার ৩০% এর কাছাকাছি পৌঁছেছিল।
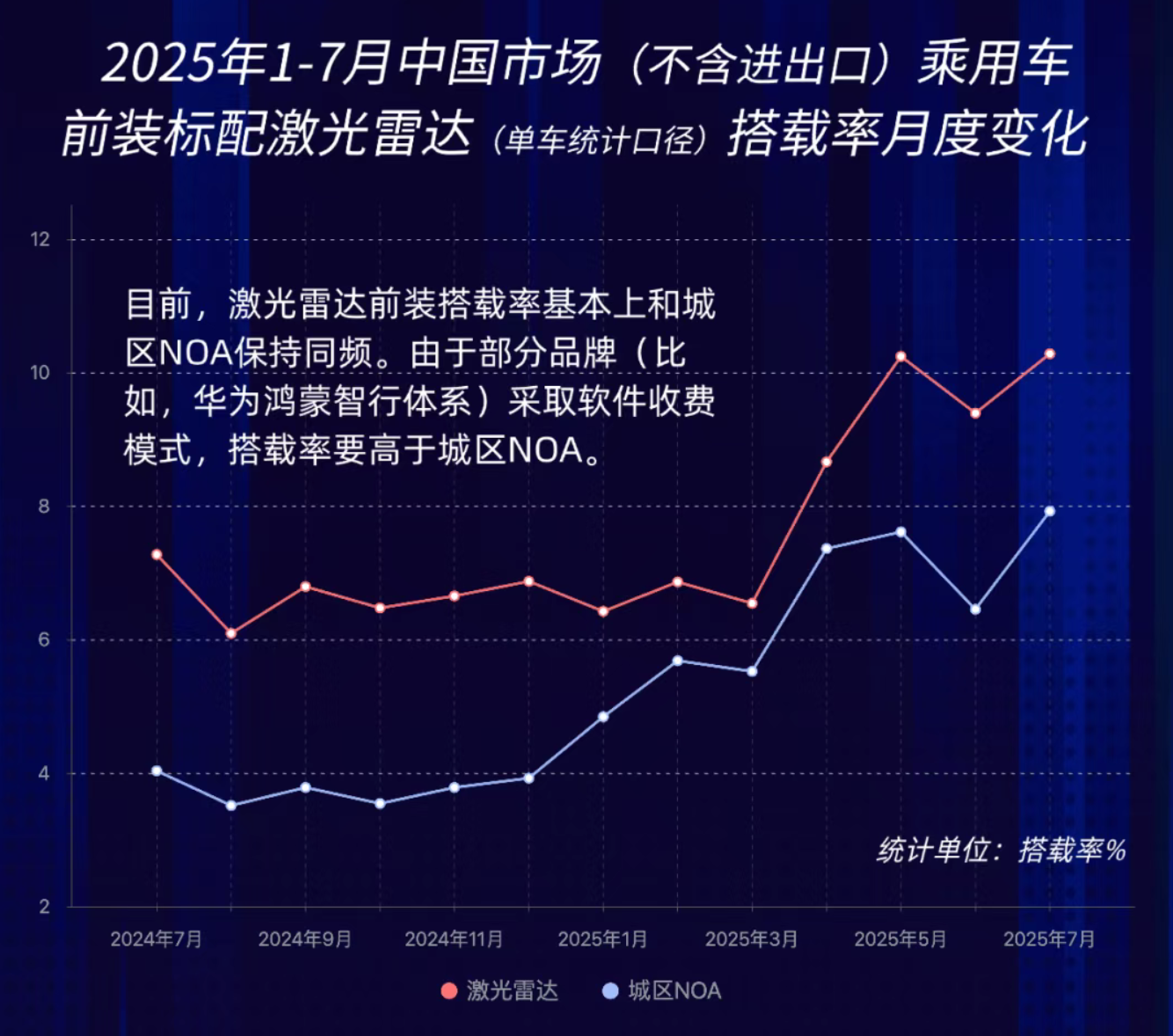
▲গাওগং ইন্টেলিজেন্ট ভেহিকেলের গ্রাফিক্স
তদুপরি, কিছু মডেল তাদের বুদ্ধিমান ড্রাইভিং ক্ষমতা উন্নত করার জন্য "একক রাডার" সমাধান নিয়ে আর সন্তুষ্ট নয়। BYD-এর Yangwang U7 এবং U8L একটি 3-লিডার সমাধান ব্যবহার করে, যেখানে Zunjie S800, Xiangjie S9T, এবং Wenjie M9 4 দিয়ে সজ্জিত। সম্প্রতি প্রকাশিত Jike 9X এমনকি 1 520-লাইন দীর্ঘ-পরিসরের রাডার + 4 উচ্চ-নির্ভুলতা সলিড-স্টেট রাডারের একটি কনফিগারেশন গ্রহণ করে, যা 360° পূর্ণ লিডার কভারেজ অর্জন করে।

▲ Zunjie S800 একটি 192-লাইন লিডার এবং তিনটি উচ্চ-নির্ভুল সলিড-স্টেট লিডার দিয়ে সজ্জিত।
"ইনস্টল করতে হবে কিনা" থেকে শুরু করে "কতগুলি ইনস্টল করতে হবে" পর্যন্ত, ড্রাইভার সহায়তা ব্যবস্থায় লিডারের ভূমিকা ক্রমশ গুরুত্বপূর্ণ হয়ে উঠছে।
আধা-কঠিন: ভর উৎপাদনের জন্য ভারসাম্য বিন্দু
তবে, লিডারেরও বিভিন্ন গ্রেড রয়েছে।
গত দুই বছরে, আমরা গাড়ি নির্মাতাদের সংবাদ সম্মেলনে আরও বেশি করে একটি নতুন শব্দ শুনতে পাচ্ছি – "সলিড-স্টেট LiDAR"।
"কঠিন অবস্থা" শব্দটি কিছুটা বিভ্রান্তিকর হতে পারে। এর অর্থ এই নয় যে লিডারে ইলেক্ট্রোলাইটের মতো কোনও মাধ্যম রয়েছে। পার্থক্যটি হল লিডার কাঠামোতে ম্যাক্রোস্কোপিক অর্থে কোনও "ঘূর্ণায়মান উপাদান" রয়েছে কিনা।
প্রথম শ্রেণীর শহরগুলিতে বসবাসকারী পাঠকরা ইতিমধ্যেই "Pony.ai" এবং "RoboCart" এর মতো রোবোট্যাক্সি পরীক্ষামূলক যানবাহনের সাথে বেশ পরিচিত হতে পারেন। এই যানবাহনগুলির প্রায়শই একটি স্বতন্ত্র বৈশিষ্ট্য থাকে – একটি যান্ত্রিক লিডার যা ছাদে ক্রমাগত ঘুরছে।
এর কাজের নীতি জটিল নয়। লেজার নির্গমন এবং অভ্যর্থনা মডিউল দিয়ে সজ্জিত সম্পূর্ণ অপটোমেকানিক্যাল কাঠামোটি আশেপাশের পরিবেশের একটি প্যানোরামিক স্ক্যান সম্পন্ন করার জন্য 360° এ অবিচ্ছিন্নভাবে ঘোরে।

বেশ কয়েক বছর ধরে চলমান রোবোট্যাক্সি পরীক্ষার তরঙ্গের সময়, এই ধরণের রাডার ছিল সবচেয়ে শক্তিশালী পছন্দ: এটি একই সাথে সমস্ত দিক থেকে পয়েন্ট ক্লাউড ডেটা ক্যাপচার করতে পারে, দীর্ঘ পরিসর (প্রায় 200 মিটার) এবং উচ্চ নির্ভুলতার সাথে, এটি উপলব্ধি ব্যবস্থার জন্য "স্বর্ণ মান" করে তোলে।
তবে, উচ্চ কর্মক্ষমতা উচ্চ খরচের সাথে সম্পর্কিত। একটি একক যান্ত্রিক লিডারের প্রায়শই কয়েক হাজার ইউয়ান খরচ হয় এবং এর সমাবেশ প্রক্রিয়া জটিল, যার ফলে ব্যাপক উৎপাদন কঠিন হয়ে পড়ে।
এছাড়াও, অপটিক্যাল ইঞ্জিনের কাঠামোর ক্রমাগত ঘূর্ণনের ফলে যান্ত্রিক ক্ষয়ক্ষতি হবে এবং মোটর এবং বিয়ারিংগুলি সহজেই ক্ষতিগ্রস্ত হবে এবং তাদের আয়ু কম হবে। এর বড় আকার এবং যথেষ্ট ওজন গাড়ির ভিতরে ইনস্টল করা কঠিন করে তোলে এবং স্বয়ংচালিত-গ্রেড মানের শক প্রতিরোধ এবং উচ্চ তাপমাত্রা প্রতিরোধের প্রয়োজনীয়তা পূরণ করা কঠিন।

আধা-সলিড-স্টেট প্রযুক্তির রুটই সত্যিকার অর্থে LiDAR কে পরীক্ষামূলক থেকে ব্যাপক উৎপাদনে যেতে সক্ষম করেছে।
সম্পূর্ণ মেশিনটি ঘোরানোর পরিবর্তে ক্ষুদ্র স্ক্যান করার জন্য এটির কেবল কয়েকটি উপাদান (যেমন প্রতিফলক এবং প্রিজম) প্রয়োজন, ফলে কর্মক্ষমতা, খরচ এবং নির্ভরযোগ্যতার ভারসাম্য বজায় থাকে। এর গঠন আরও কম্প্যাক্ট এবং দীর্ঘ আয়ুষ্কাল রয়েছে, যা ছাদ বা গ্রিলের সাথে সংহত করা সহজ করে তোলে।
আধা-সলিড সমাধানগুলি এমন একটি ভারসাম্যের প্রতিনিধিত্ব করে যা অটোমেকাররা কর্মক্ষমতা, খরচ এবং অটোমোটিভ-গ্রেড সম্ভাব্যতার মধ্যে খুঁজে পেয়েছে এবং এখন ব্যাপকভাবে উৎপাদিত যানবাহনের জন্য মূলধারার পছন্দ হয়ে উঠেছে।
প্রযুক্তির পরিপক্কতার সাথে সাথে, সেমি-সলিড-স্টেট লিডারের খরচ বছর বছর কমছে। লিডারের কর্মক্ষমতার উপর নির্ভর করে, একটি একক সেমি-সলিড-স্টেট লিডার ইউনিটের বর্তমান খরচ প্রায় ১,৪০০ ইউয়ান থেকে ৪,০০০ ইউয়ান পর্যন্ত।
তবে, যেহেতু শুধুমাত্র কিছু উপাদানই নড়াচড়া করতে পারে, তাই আধা-সলিড-স্টেট LiDAR-এর সনাক্তকরণ কোণ তুলনামূলকভাবে সীমিত, সাধারণত অনুভূমিকভাবে প্রায় 120° এবং উল্লম্বভাবে 20°। অতএব , গাড়ি নির্মাতারা সাধারণত এটি গাড়ির সামনে রাখে, অন্যদিকে মিলিমিটার-তরঙ্গ রাডার এবং ক্যামেরা ব্যবহার করে পাশে এবং পিছনের অন্ধ স্থানগুলি পূরণ করে। এটি আজ আমরা দেখতে পাই এমন সবচেয়ে সাধারণ অটোমোটিভ সেন্সর সমাধান।

যদি আধা-সলিড-স্টেট LiDAR "যানবাহনে ইনস্টল করা যাবে কিনা" এই সমস্যার সমাধান করে, তাহলে সলিড-স্টেট LiDAR "যান্ত্রিক কাঠামো সম্পূর্ণরূপে নির্মূল করার" ভবিষ্যতের দিকনির্দেশনা উপস্থাপন করে।
এর কোনও চলমান অংশ নেই এবং স্ক্যানিং বৈদ্যুতিক সংকেত দ্বারা সম্পন্ন হয়। এটি লিডারের একটি "বিশুদ্ধ ইলেকট্রনিক" রূপ, যা রশ্মির নির্গমন, স্ক্যানিং এবং গ্রহণ উপলব্ধি করার জন্য সেমিকন্ডাক্টর প্রযুক্তির উপর নির্ভর করে।

▲হেসাই টেকনোলজি FT120 সলিড স্টেট LiDAR
বর্তমানে, অল-সলিড-স্টেট LiDAR-এর জন্য দুটি প্রধান প্রযুক্তিগত রুট রয়েছে: ফ্ল্যাশ এবং OPA। OPA-কে পরবর্তী 3-5 বছরের জন্য উচ্চ-স্তরের রুট হিসাবে বিবেচনা করা হয়, যদিও ফ্ল্যাশ সমাধানটি আরও পরিপক্ক, এবং বর্তমানে ব্যাপক উৎপাদনে থাকা বেশিরভাগ সলিড-স্টেট LiDAR ফ্ল্যাশ সমাধান ব্যবহার করে।
তবে, প্রযুক্তিগত পরিপক্কতার সীমাবদ্ধতার কারণে, ১০% প্রতিফলনশীলতায় অল-সলিড-স্টেট রাডারের সনাক্তকরণ পরিসর মাত্র ২৫-৩০ মিটার, যা সামনের দিকে সনাক্তকরণের জন্য অপর্যাপ্ত এবং সাধারণত যানবাহনের পাশে এবং পিছনের ব্লাইন্ড স্পট কভারেজের জন্য ব্যবহৃত হয়।
কিছু অটোমেকারের প্রকৌশলীরা অল-সলিড-স্টেট LiDAR-এর প্রয়োগের ক্ষেত্রে কিছু লেনদেন করেছেন, যেমন উল্লম্ব সনাক্তকরণ কোণ 75° বা এমনকি 90° পর্যন্ত বৃদ্ধি করা, যাতে যানবাহনগুলি গাড়ির বডির কাছাকাছি এবং নিচু বাধাগুলি সনাক্ত করতে পারে, যেমন ধাপ, কোণ ইত্যাদি।
বর্তমানে, সলিড-স্টেট LiDAR প্রযুক্তি এখনও সম্পূর্ণরূপে পরিপক্ক নয়, একক ইউনিটের দাম প্রায় 1,500 ইউয়ান, যা মিলিমিটার-তরঙ্গ রাডার এবং ক্যামেরার খরচের চেয়ে উল্লেখযোগ্যভাবে বেশি। অতএব, এটি বেশিরভাগ ক্ষেত্রেই শুধুমাত্র উচ্চমানের যানবাহনে সজ্জিত।
রেখা গণনা: LiDAR এর বিভিন্ন স্তরের মধ্যে বিভাজক রেখা (আলো সনাক্তকরণ এবং র্যাঙ্কিং)
গঠন এবং আকারের পার্থক্য ছাড়াও, এমনকি সর্বাধিক ব্যবহৃত আধা-কঠিন-অবস্থার লিডারগুলির মধ্যেও, গ্রেডের ক্ষেত্রে আসলে খুব "কঠোর" পার্থক্য রয়েছে।
যেমনটি আমরা আগেই উল্লেখ করেছি, রাডারের কর্মক্ষমতার উপর নির্ভর করে, একটি একক সেমি-সলিড-স্টেট লিডার ইউনিটের দাম বর্তমানে প্রায় ১,৪০০ ইউয়ান থেকে ৪,০০০ ইউয়ান পর্যন্ত।
শিল্পে LiDAR নির্বাচনের ক্ষেত্রে, সবচেয়ে বেশি উল্লেখিত প্রযুক্তিগত সূচক হল "লাইন গণনা"।
"লাইন কাউন্ট" শব্দটি একটি রাডার একই সাথে কতগুলি লেজার রশ্মি প্রেরণ এবং গ্রহণ করতে পারে তা বোঝায়। প্রতিটি লেজার রশ্মি পরিবেশ স্ক্যান করে এবং একটি প্রতিফলিত সংকেত প্রদান করে, একটি বিস্তৃত বিন্দু তৈরি করে; এই সমস্ত বিন্দু একত্রিত হয়ে আমরা যাকে সাধারণত "পয়েন্ট ক্লাউড" বলি তা গঠন করে।
যত বেশি রেখা থাকবে, বিন্দু মেঘ তত ঘন হবে এবং গাড়ির কাছে পৃথিবী তত স্পষ্ট দেখাবে।
আপনি এটিকে "মেগাপিক্সেল" থেকে "কয়েক লক্ষ পিক্সেল"-এ আপগ্রেড করা একটি মোবাইল ফোন ক্যামেরা হিসেবে ভাবতে পারেন—কম লাইন কাউন্ট হল একটি কম-পিক্সেল ছবির মতো, যেখানে আপনি কেবল রূপরেখা দেখতে পাবেন; উচ্চ লাইন কাউন্ট হল একটি অতি-উচ্চ-সংজ্ঞার ছবির মতো, যেখানে দূরবর্তী মানুষের চোখের পলকও স্পষ্টভাবে আলাদা করা যায়।
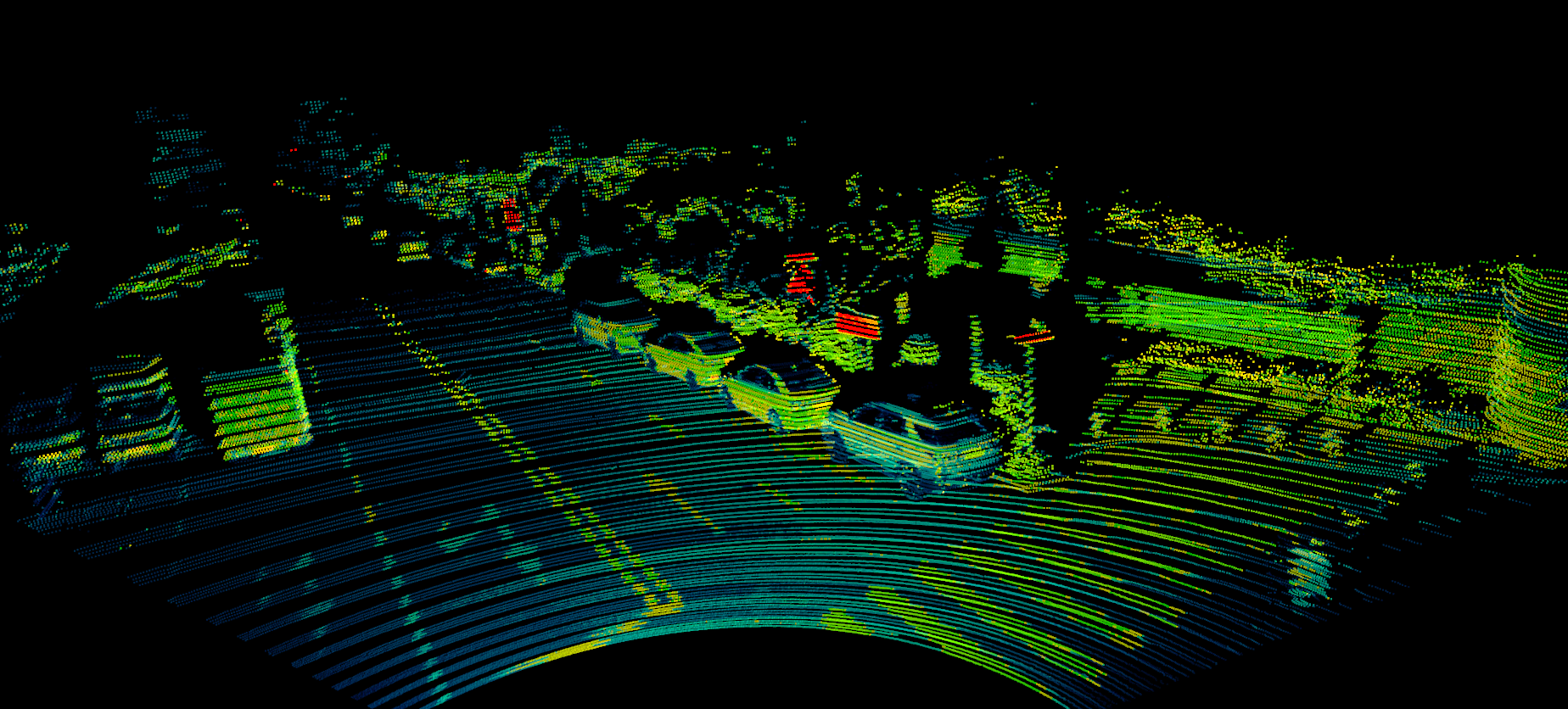
▲ 3D পয়েন্ট ক্লাউড ম্যাপ
ক্লাসিক যান্ত্রিক রাডারগুলিতে, যেমন প্রাথমিক 64-লাইন মডেলগুলিতে, ইঞ্জিনিয়াররা 64 সেট লেজার ট্রান্সমিটার এবং রিসিভারগুলিকে একটি বৃত্তাকার কাঠামোর উপর স্ট্যাক করতেন। ট্রান্সমিটার এবং রিসিভার মডিউলের প্রতিটি জোড়া একটি ভিন্ন উল্লম্ব কোণে স্থির করা হয়েছিল, একসাথে একটি সম্পূর্ণ স্ক্যানিং অ্যারে তৈরি করেছিল।
আধা-সলিড-স্টেট প্রযুক্তির যুগে প্রবেশের পর, সমগ্র শিল্প সমন্বিত স্ক্যানিং সিস্টেমের দিকে ঝুঁকতে শুরু করে। মূল ধারণা হল উচ্চ-গতির স্ক্যানিং ব্যবস্থার মাধ্যমে কম লেজার ব্যবহার করে আরও লাইন "পুনঃব্যবহার" করা।
এর ফলে একটি শিল্প ধারণারও জন্ম হয়েছে: একটি লিডারের দুটি প্রযুক্তিগত সূচক থাকবে: প্রকৃত লাইন গণনা এবং সমতুল্য লাইন গণনা। প্রকৃত লাইন গণনা হল শারীরিকভাবে স্বাধীন ট্রান্সমিট/রিসিভ চ্যানেলের সংখ্যা; সমতুল্য লাইন গণনা হল স্ক্যান মাল্টিপ্লেক্সিং প্রযুক্তি দ্বারা গঠিত "ভিজ্যুয়াল এফেক্ট" লাইন গণনা। ডেটা পারফরম্যান্সের দিক থেকে এটি হাই-লাইন রাডারের মতো, তবে মূলত এটি উচ্চ-ফ্রিকোয়েন্সি স্ক্যানিং এবং সুনির্দিষ্ট সময়ের উপর নির্ভর করে।
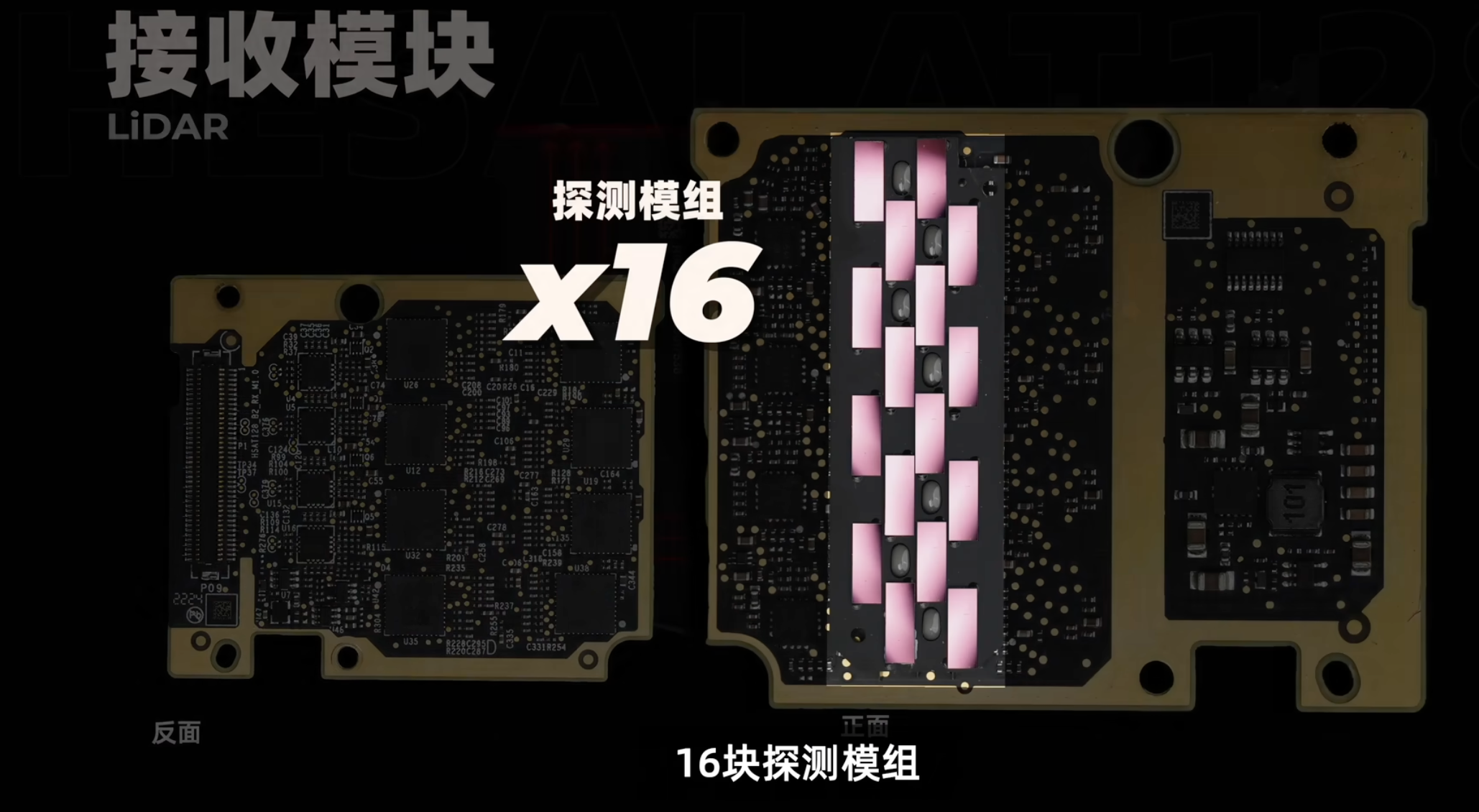
▲ হেসাই ১২৮-লাইন লিডারের সনাক্তকরণ মডিউল, উৎস: বিলিবিলি @GreenCoreChannel_ECC
এই সমন্বিত স্ক্যানিং সিস্টেমটি সম্ভবত NVIDIA গ্রাফিক্স কার্ডের DLSS ফাংশনের অনুরূপ বলে বোঝা যেতে পারে। এই প্রযুক্তিগত পদ্ধতিটি অটোমোটিভ-গ্রেড LiDAR কে বাস্তবে পরিণত করে এবং 128-লাইন, 300-লাইন এবং এমনকি 500-লাইন LiDAR এর খরচ উল্লেখযোগ্যভাবে হ্রাস করে।
তাহলে কম লাইন কাউন্টের তুলনায় বেশি লাইন কাউন্টের সুবিধা কী?
একটি উপলব্ধি ব্যবস্থায়, লাইনের সংখ্যা বৃদ্ধি কেবল "আরও পয়েন্ট"ই নয়, বরং পয়েন্ট ক্লাউডের গুণমান এবং সিস্টেমের আত্মবিশ্বাসেও একটি উল্লম্ফন ঘটায়।
এটি ঘন কুয়াশায় কোনও বস্তু পর্যবেক্ষণ করার মতো। নিম্ন রেখা গণনা (যেমন ১৬টি রেখা) হল কয়েকটি বিক্ষিপ্ত টর্চলাইট ধরার মতো, বিমগুলি মাঝে মাঝে কেবল কয়েকটি অংশ ধারণ করতে পারে, যার ফলে বস্তুর সম্পূর্ণ ছবি বিচার করা কঠিন হয়ে পড়ে; অন্যদিকে উচ্চ রেখা গণনা (যেমন ১৯২টি রেখা) হল একটি বিশাল সার্চলাইট অ্যারের মতো, যা তাৎক্ষণিকভাবে পুরো দৃশ্যকে আলোকিত করে, বস্তুর আকৃতি, ভঙ্গি এবং এমনকি বিশদ বিবরণ এক নজরে স্পষ্ট করে তোলে।
▲ ৬৪-লাইন সলিড-স্টেট লিডারের পয়েন্ট ক্লাউড ম্যাপ
উদাহরণস্বরূপ, ১৫০ মিটার দূরত্বে, একজন পথচারী ১৬-লাইনের রাডারের বিন্দু মেঘে মাত্র ১-২টি প্রতিফলন বিন্দু রেখে যেতে পারে। অ্যালগরিদমের এটি প্রকৃত লক্ষ্যবস্তু নাকি শব্দ তা নির্ধারণ করতে অসুবিধা হয় এবং ভুল সিদ্ধান্ত নেওয়ার যথেষ্ট সম্ভাবনা থাকে।
১২৮-লাইনের রাডারের পয়েন্ট ক্লাউডে, একজন পথচারীর রূপরেখা এক ডজন বিন্দু দ্বারা চিত্রিত করা হয় এবং অ্যালগরিদম স্পষ্টভাবে তার আকৃতি এবং গতিবিধির দিক সনাক্ত করতে পারে, যা আত্মবিশ্বাসের স্তর কয়েকগুণ বাড়িয়ে দেয়।
উদাহরণস্বরূপ, একটি ৬৪-লাইনের রাডার কেবল জানতে পারে যে সামনে একটি বস্তু আছে; একটি ১২৮-লাইনের রাডার পার্থক্য করতে পারে যে এটি একটি "অনুভূমিক ট্রাক"; এবং একটি ৫০০-লাইনের রাডার আরও সনাক্ত করতে পারে যে "ট্রাকটি ডানদিকে পার্ক করা আছে এবং এর পিছনের অংশটি ৩০ সেন্টিমিটার প্রসারিত"।
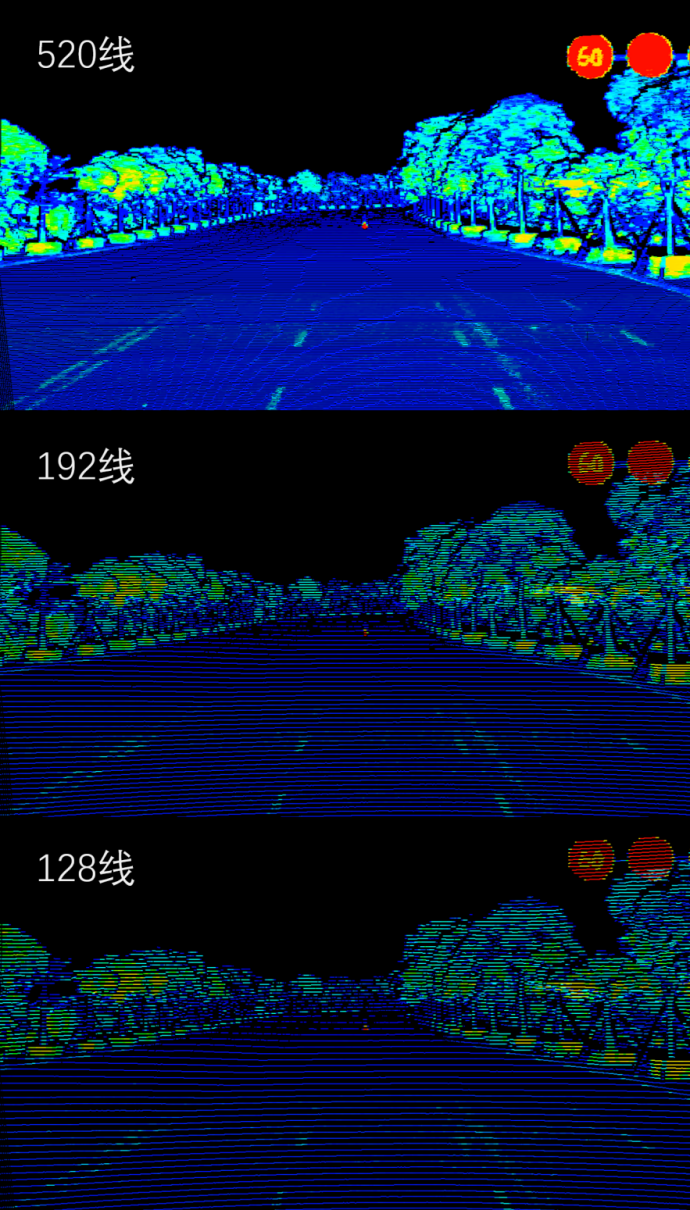
▲ বিভিন্ন বিমপ্রস্থের সাথে লিডার থেকে বিন্দু মেঘের তুলনা
স্বায়ত্তশাসিত ড্রাইভিং সিস্টেমের ক্ষেত্রে, এই সূক্ষ্ম পার্থক্যগুলি উপলব্ধিতে একটি গুণগত পরিবর্তনকে নির্দেশ করে, "বস্তু এড়িয়ে চলা" থেকে "দৃশ্য বোঝার" দিকে।
উচ্চতর রেখা গণনা সনাক্তকরণ পরিসরে একটি লাফও নির্দেশ করে। ৬৪-লাইনের সেমি-সলিড-স্টেট লিডারের পরিসর প্রায় ১৫০ থেকে ২০০ মিটার, ১২৮-লাইনের লিডার প্রায় ২০০ থেকে ২৫০ মিটার এবং ৫০০-লাইনের লিডার ৩০০ মিটারেরও বেশি সনাক্তকরণ পরিসরে লাফ দিতে পারে, যার ফলে বাধাগুলি আগে এবং আরও সময়মত সনাক্ত করা সম্ভব হয়।
তদুপরি, উল্লম্ব কোণের ক্ষেত্রে, নিম্ন-রেখা-গণনা রাডারের সাধারণত 0.5° এর বেশি উল্লম্ব কৌণিক রেজোলিউশন থাকে, যার অর্থ হল কাছাকাছি পরিসরে ভূমি এবং রাস্তার প্রান্তগুলি একই সমতল হিসাবে অনুভূত হতে পারে। অন্যদিকে, উচ্চ-রেখা-গণনা রাডার কৌণিক রেজোলিউশনকে 0.1° বা তার কম সংকুচিত করতে পারে, যেখানে রাস্তার পৃষ্ঠের উচ্চতার পার্থক্য মাত্র কয়েক সেন্টিমিটার – যেমন ম্যানহোলের কভার, গতির বাধা এবং কম বাধা – বিশদগুলি আলাদা করে।
এটি কেবল উপলব্ধির নির্ভুলতা উন্নত করে না বরং যানবাহনের পথ পরিকল্পনাকে মসৃণ এবং নিরাপদ করে তোলে।

▲ উচ্চ-নির্ভুলতা লিডার নেতিবাচক বাধা সনাক্ত করতে পারে।
তবে, হাই-বিম লিডারের ত্রুটিও কম নয়।
উচ্চ খরচের পাশাপাশি, পয়েন্ট ক্লাউড ডেটার পরিমাণ লাইনের সংখ্যার সাথে সরাসরি সমানুপাতিক। একটি ১২৮-লাইন রাডার ১৬-লাইন রাডারের তুলনায় প্রতি সেকেন্ডে আট গুণ বেশি ডেটা পয়েন্ট তৈরি করতে পারে। এটি ডেটা ইন্টারফেস ব্যান্ডউইথ, প্রধান নিয়ন্ত্রণ চিপের প্রক্রিয়াকরণ শক্তি এবং পরবর্তী উপলব্ধি অ্যালগরিদমের গণনা দক্ষতার জন্য একটি গুরুত্বপূর্ণ চ্যালেঞ্জ তৈরি করে। যদি কম্পিউটিং প্ল্যাটফর্মটি তাল মিলিয়ে চলতে না পারে, তাহলে উচ্চ লাইন গণনার সুবিধাটি বাস্তবায়িত হবে না এবং এটি সিস্টেমের উপর বোঝা হয়ে উঠবে।
বর্তমানে, ৫০০ টিরও বেশি লাইন সহ LiDAR সিস্টেম দিয়ে সজ্জিত শুধুমাত্র একটি গণ-উত্পাদিত যান রয়েছে – JK9X, যা ডুয়াল NVIDIA Thor-U চিপ ব্যবহার করে এবং ৫৫৯,৯০০ ইউয়ান থেকে শুরু হয়।

▲ ক্রিপ্টন 9X সেন্সর সমাধান
তবে, আমরা শীঘ্রই আরেকটি গাড়ি, ভোয়া তাইশান দেখতে পাব, যা নভেম্বরে লঞ্চ হওয়ার কথা। এটিতে Huawei Qiankun ইন্টেলিজেন্ট ড্রাইভিং ADS 4 Ultra থাকবে। 500-এরও বেশি লাইনের LiDAR এর আত্মপ্রকাশের মাধ্যমে, এটি ওয়েঞ্জি M9 এর তুলনায় বুদ্ধিমান ড্রাইভিং ক্ষেত্রে আরও শক্তিশালী পার্থক্যমূলক সুবিধা অর্জন করতে সক্ষম হতে পারে, যা 192-লাইনের LiDAR দিয়ে সজ্জিত।

▲ ল্যান্টু তাইশান
LiDAR-এর বিবর্তন, ঘূর্ণন থেকে স্থির, বিন্দু থেকে পৃষ্ঠে এবং তারপর স্থানিক মাত্রার সম্প্রসারণ, মূলত যানবাহনগুলিকে "আরও স্পষ্টভাবে দেখতে" সক্ষম করার একটি প্রতিযোগিতা।
আগামী কয়েক বছরে, সলিড-স্টেট রাডার সস্তা হয়ে ওঠার সাথে সাথে এবং অ্যালগরিদমগুলি আরও শক্তিশালী হওয়ার সাথে সাথে, লিডার প্রতিটি স্মার্ট গাড়িতে একটি স্ট্যান্ডার্ড বৈশিষ্ট্য হয়ে উঠতে পারে, ঠিক যেমন এয়ারব্যাগ বা ক্যামেরা।
#iFaner-এর অফিসিয়াল WeChat পাবলিক অ্যাকাউন্ট অনুসরণ করতে আপনাকে স্বাগতম: iFaner (WeChat ID: ifanr), যেখানে যত তাড়াতাড়ি সম্ভব আরও উত্তেজনাপূর্ণ সামগ্রী আপনার কাছে উপস্থাপন করা হবে।